الأحد، 13 نوفمبر 2016
الأربعاء، 9 نوفمبر 2016
الثلاثاء، 8 نوفمبر 2016
الجمعة، 2 سبتمبر 2016
الخميس، 19 مايو 2016
الثلاثاء، 10 مايو 2016
اسئلة مراجعة مهمة على الوحدة الثالثة الروبوت
السؤال الثاني: اكتب المصطلح العلمي الدال على كل مما یلي:
١. ( ) آلة الكترومیكانیكیة تمتلك الذكاء الاصطناعي قادرة على اتخاذ القرار في ظروف متغیرة.
٢. ( ) كلمة تشیكیة تشیر إلى العمل بالإجبار بدون مقابل ( السخرة ).
٣ . ( ) من أشهر الأمثلة على الآلات المسیرة ذاتیا لبدیع الزمان الجزري .
٤. ( ) من أعظم المخترعین صاحب كتاب الجامع بین العلم والعمل النافع في صناعة الحیل .
٥. ( ) تنفذ مهام مبرمجة حسب الزمان والمكان المعروفین مسبقا .
٦. ( ) مجال للروبوت یستخدم في تجمیع السيارات ، والأجهزة الإلكترونیة .
٧. ( ) دارة إلكترونیة تستخدم لتحویل الإشارة التماثلیة إلى إشارة رقمیة .
٨. ( ) مجال للروبوت یستخدم لاستكشاف الكواكب وصیانة الأقمار الصناعیة.
٩. ( ) دارة إلكترونیة متكاملة لها مدخلان أحدهما موجب والآخر سالب ولها مخرج واحد .
١٠ . ( ) تحول الكمیات الفیزیائیةلإشارات كهربائیة .
١١ . ( ) هو أحد تطبیقات علم الحاسوب الحدیثة یختص في انتاج برمجیات محوسبة تحاكي القدرة الذهنیة البشریة
١٢ . ( ) معالجةالاشارات الكهربائیة الواردة من المدخلات لاتخاذالقرار المناسب .
١٣ . ( ) تحویل الاشارات الكهربائیة الواردة من المتحكم إلى كمیات فیزیائیة وعرضها .
١٤ . ( ) یتم الحصول علیها من المجسات أو أوامر برمجیة أو من الإنسان .
١٥ . ( ) جهاز إلكترومیكانیكي یقوم بوظیفة تتبع خط أسود مرسوم على أرضیة بیضاء .
١٦ . ( ) حالة یكون فیها كلا المجسین للروبوت أسفلهما اللون الأسود .
١٧ . ( ) ثنائي یرسل الأشعة تحت الحمراء ویوصل في حالة انحیاز أمامي.
١٨ . ( ) عبارة عن عنصر الكتروني یعمل على تضخیم التیار الواصل للمخرجات.
١٩ . ( ) روبوت استخدم في مجال الفضاء لاستكشاف كوكب المریخ .
٢٠. ( ) عنصر الكتروني یوصل مع الثنائي المستقبل لضبط حساسیة المجسات .
السؤال الثالث : ضع دائرة حول رمز الإجابة الصحیحة:
١. من أشهر الأمثلة على الآلات المسیرة ذاتیا:
أ. الساعة الالكترونیة ب . غاسل الیدین الآلي ج . روبوت متتبع الخط د . روبوت المتاهة
٢. من أعظم المهندسین والمیكانیكیین والمخترعین عبر التاریخ:
أ. الخوارزمي ب. بدیع الزمان الجزري ج. ابن سینا د. ابن النفیس
٣. یمتلك القدرة على اتخاذ االقرار حسب ظروف متغیرة:
أ. الروبوت ب. الآلة العادیة ج. الترانزستور د. المجسات
٤. تنفذ المهام المبرمجة حسب زمان ومكان معروفین مسبقا:
أ. الروبوت ب. الآلة العادیة ج. الترانزستور د. المجسات
٥. یستخدم الروبوت في تجمیع السیا ا رت، والأجهزة الإلكترونیة في المجال :
أ. الصناعة ب. الزراعة ج. الخدماتیة د. الطب
٦. یتم استخدام الروبوت لتفكیك الأجسام المشبوهة والتعامل مع المواد الخطرة في المجال:
أ. الصناعة ب. الخدماتیة ج. الأمن والسلامة د. الفضاء
٧. جمیع ما یلي من مكونات الروبوت ما عدا:
أ. المدخلات ب. المعالجة والتحكم ج. المخرجات د. الخط الأسود
٨. تحول الكمیات الفیزیائیة لاشارات كهربائیة، وترسلها للمتحكم لاتخاذ القرارات اللازمة :
أ. المجس ب. الترانزستور ج. المقاومة د .الثنائي
٩. إشا ا ر ت كهربائیة یتم الحصول علیها من المجسات التي تحول الكمیات الفیزیائیة لاشارات كهربائیة:
أ. المدخلات ب. المخرجات ج. العملیات د. لیس مما سبق
١٠ . تعتبر المجسات الضوئیة المستخدمة في الروبوت المتتبع للخط مثالا على:
أ. المدخلات ب . العمليات ج. المخرجات د. لیس مما سبق
١١ . معالجة الإشا ا رت الكهربائیة الواردة من المدخلات، لاتخاذالقرار المناسب وارساله على شكل اشارات كهربائیة:
أ. المدخلات ب. العملیات ج. المخرجات د. لیس مما سبق
١٢ . اتخاذ الروبوت القرار بتغییر الاتجاه عند خروجه عن الخط الأسود مثالا على:
أ. المدخلات ب. العملیات ج. المخرجات د. لیس مما سبق
١٣ . نقل الأشیاء بواسطة ذ ا رع الروبوت من مكان لآخر مثالا على :
أ. المدخلات ب. العملیات ج. المخرجات د. لیس مما سبق
١٤ . یقوم الروبوت بتتبع خط أسود مرسوم على أرضیة بیضاء من خلال :
أ. مقاومة ثابتة ب. الترانزستور ج. المجسات د. مقاومة متغیرة
١٥ . عندما یكون الخط الأسود بین المجسین الأیمن والأیسر، فإن:
أ. الأشعة تنعكس ب. الأشعة لا تنعكس ج. یصل جهد كافي لقاعدة الترانزستور د. أ+ج
١٦ . عندما ینحرف الروبوت جهة الیمین فإن:
أ. الأشعة تنعكس ب. الأشعة لا تنعكس ج. یصل جهد كافي د . یتوقف المحرك الأیمن
١٧ . وظیفة الترانزستور الأول في دارة الروبوت :
أ. مضخم للتیار ب. مضخم للجهد ج. مفتاح الكتروني د. مفتاح كهربائي
١٨ . من مخرجات النظام في الروبوت متتبع الخط الأسود:
أ. المجسات ب. المحرك ج. الترانزستورات د. المقاومة
١٩ . في الدارة الالكترونیة للروبوت متتبع الخط الأسود یوصل مع المحرك:
أ. ثنائي عادي ب. ثنائي ضوئي ج. مقاومة ثابتة د. مقاومة متغیرة
٢٠ . یوصل الثنائي الباعث للضوءIR :
أ. انحیاز أمامي ب. انحیاز عكسي ج. OFF د. لیس مما سبق.
٢١ . یقوم بتحویل الاشارة التماثلیة من المدخلین الى اشارة رقمیة في المخرج :
أ. الترانزستور ب. المقارن ج. الاردوینو د. المحرك
٢٢ . روبوت استخدم في مجال الفضاء لاستكشاف كوكب المریخ :
أ. دافنشي ب. سبیریت ج. باكبوتس د. هیومانوید
٢3 . یتم تصمیم الدرارات الكهربائیة باستخدام برامج هندسیة متخصصة مثل :
أ. برنامج بروتس ب. الأور كاد ج. سركت ویزرد د. جمیع ما سبق
٢4 . عنصر الكتروني یتحكم بدرجة حساسیة المجسات :
أ. الثنائي الباعث ب. المقاومة الثابتة ج. المقاومة المتغیرة د. الترانزستور
٢٦ . جمیع ما یلي صحیح إذا كان قیمة المخرج 0=Vout :
أ. السطح المقابل للروبوت أسود ب. تزید مقاومة المستقبل ج. تقل مقاومة المستقبل دVA > VB .
٢٧ . تعتبر عضلات الروبوت حیث تقوم بتحویل الطاقة المخزنة إلى طاقة حركیة:
أ. الترانزستور ب. المقاومات ج. المجسات د. المحركات
٢٨ . جمیع ما یلي من طرق انتقال الروبوت من مكان لآخر ما عدا:
أ. العجلات ب. السیقان ج. الذراع د. السلسلة
١. ( ) آلة الكترومیكانیكیة تمتلك الذكاء الاصطناعي قادرة على اتخاذ القرار في ظروف متغیرة.
٢. ( ) كلمة تشیكیة تشیر إلى العمل بالإجبار بدون مقابل ( السخرة ).
٣ . ( ) من أشهر الأمثلة على الآلات المسیرة ذاتیا لبدیع الزمان الجزري .
٤. ( ) من أعظم المخترعین صاحب كتاب الجامع بین العلم والعمل النافع في صناعة الحیل .
٥. ( ) تنفذ مهام مبرمجة حسب الزمان والمكان المعروفین مسبقا .
٦. ( ) مجال للروبوت یستخدم في تجمیع السيارات ، والأجهزة الإلكترونیة .
٧. ( ) دارة إلكترونیة تستخدم لتحویل الإشارة التماثلیة إلى إشارة رقمیة .
٨. ( ) مجال للروبوت یستخدم لاستكشاف الكواكب وصیانة الأقمار الصناعیة.
٩. ( ) دارة إلكترونیة متكاملة لها مدخلان أحدهما موجب والآخر سالب ولها مخرج واحد .
١٠ . ( ) تحول الكمیات الفیزیائیةلإشارات كهربائیة .
١١ . ( ) هو أحد تطبیقات علم الحاسوب الحدیثة یختص في انتاج برمجیات محوسبة تحاكي القدرة الذهنیة البشریة
١٢ . ( ) معالجةالاشارات الكهربائیة الواردة من المدخلات لاتخاذالقرار المناسب .
١٣ . ( ) تحویل الاشارات الكهربائیة الواردة من المتحكم إلى كمیات فیزیائیة وعرضها .
١٤ . ( ) یتم الحصول علیها من المجسات أو أوامر برمجیة أو من الإنسان .
١٥ . ( ) جهاز إلكترومیكانیكي یقوم بوظیفة تتبع خط أسود مرسوم على أرضیة بیضاء .
١٦ . ( ) حالة یكون فیها كلا المجسین للروبوت أسفلهما اللون الأسود .
١٧ . ( ) ثنائي یرسل الأشعة تحت الحمراء ویوصل في حالة انحیاز أمامي.
١٨ . ( ) عبارة عن عنصر الكتروني یعمل على تضخیم التیار الواصل للمخرجات.
١٩ . ( ) روبوت استخدم في مجال الفضاء لاستكشاف كوكب المریخ .
٢٠. ( ) عنصر الكتروني یوصل مع الثنائي المستقبل لضبط حساسیة المجسات .
السؤال الثالث : ضع دائرة حول رمز الإجابة الصحیحة:
١. من أشهر الأمثلة على الآلات المسیرة ذاتیا:
أ. الساعة الالكترونیة ب . غاسل الیدین الآلي ج . روبوت متتبع الخط د . روبوت المتاهة
٢. من أعظم المهندسین والمیكانیكیین والمخترعین عبر التاریخ:
أ. الخوارزمي ب. بدیع الزمان الجزري ج. ابن سینا د. ابن النفیس
٣. یمتلك القدرة على اتخاذ االقرار حسب ظروف متغیرة:
أ. الروبوت ب. الآلة العادیة ج. الترانزستور د. المجسات
٤. تنفذ المهام المبرمجة حسب زمان ومكان معروفین مسبقا:
أ. الروبوت ب. الآلة العادیة ج. الترانزستور د. المجسات
٥. یستخدم الروبوت في تجمیع السیا ا رت، والأجهزة الإلكترونیة في المجال :
أ. الصناعة ب. الزراعة ج. الخدماتیة د. الطب
٦. یتم استخدام الروبوت لتفكیك الأجسام المشبوهة والتعامل مع المواد الخطرة في المجال:
أ. الصناعة ب. الخدماتیة ج. الأمن والسلامة د. الفضاء
٧. جمیع ما یلي من مكونات الروبوت ما عدا:
أ. المدخلات ب. المعالجة والتحكم ج. المخرجات د. الخط الأسود
٨. تحول الكمیات الفیزیائیة لاشارات كهربائیة، وترسلها للمتحكم لاتخاذ القرارات اللازمة :
أ. المجس ب. الترانزستور ج. المقاومة د .الثنائي
٩. إشا ا ر ت كهربائیة یتم الحصول علیها من المجسات التي تحول الكمیات الفیزیائیة لاشارات كهربائیة:
أ. المدخلات ب. المخرجات ج. العملیات د. لیس مما سبق
١٠ . تعتبر المجسات الضوئیة المستخدمة في الروبوت المتتبع للخط مثالا على:
أ. المدخلات ب . العمليات ج. المخرجات د. لیس مما سبق
١١ . معالجة الإشا ا رت الكهربائیة الواردة من المدخلات، لاتخاذالقرار المناسب وارساله على شكل اشارات كهربائیة:
أ. المدخلات ب. العملیات ج. المخرجات د. لیس مما سبق
١٢ . اتخاذ الروبوت القرار بتغییر الاتجاه عند خروجه عن الخط الأسود مثالا على:
أ. المدخلات ب. العملیات ج. المخرجات د. لیس مما سبق
١٣ . نقل الأشیاء بواسطة ذ ا رع الروبوت من مكان لآخر مثالا على :
أ. المدخلات ب. العملیات ج. المخرجات د. لیس مما سبق
١٤ . یقوم الروبوت بتتبع خط أسود مرسوم على أرضیة بیضاء من خلال :
أ. مقاومة ثابتة ب. الترانزستور ج. المجسات د. مقاومة متغیرة
١٥ . عندما یكون الخط الأسود بین المجسین الأیمن والأیسر، فإن:
أ. الأشعة تنعكس ب. الأشعة لا تنعكس ج. یصل جهد كافي لقاعدة الترانزستور د. أ+ج
١٦ . عندما ینحرف الروبوت جهة الیمین فإن:
أ. الأشعة تنعكس ب. الأشعة لا تنعكس ج. یصل جهد كافي د . یتوقف المحرك الأیمن
١٧ . وظیفة الترانزستور الأول في دارة الروبوت :
أ. مضخم للتیار ب. مضخم للجهد ج. مفتاح الكتروني د. مفتاح كهربائي
١٨ . من مخرجات النظام في الروبوت متتبع الخط الأسود:
أ. المجسات ب. المحرك ج. الترانزستورات د. المقاومة
١٩ . في الدارة الالكترونیة للروبوت متتبع الخط الأسود یوصل مع المحرك:
أ. ثنائي عادي ب. ثنائي ضوئي ج. مقاومة ثابتة د. مقاومة متغیرة
٢٠ . یوصل الثنائي الباعث للضوءIR :
أ. انحیاز أمامي ب. انحیاز عكسي ج. OFF د. لیس مما سبق.
٢١ . یقوم بتحویل الاشارة التماثلیة من المدخلین الى اشارة رقمیة في المخرج :
أ. الترانزستور ب. المقارن ج. الاردوینو د. المحرك
٢٢ . روبوت استخدم في مجال الفضاء لاستكشاف كوكب المریخ :
أ. دافنشي ب. سبیریت ج. باكبوتس د. هیومانوید
٢3 . یتم تصمیم الدرارات الكهربائیة باستخدام برامج هندسیة متخصصة مثل :
أ. برنامج بروتس ب. الأور كاد ج. سركت ویزرد د. جمیع ما سبق
٢4 . عنصر الكتروني یتحكم بدرجة حساسیة المجسات :
أ. الثنائي الباعث ب. المقاومة الثابتة ج. المقاومة المتغیرة د. الترانزستور
٢٦ . جمیع ما یلي صحیح إذا كان قیمة المخرج 0=Vout :
أ. السطح المقابل للروبوت أسود ب. تزید مقاومة المستقبل ج. تقل مقاومة المستقبل دVA > VB .
٢٧ . تعتبر عضلات الروبوت حیث تقوم بتحویل الطاقة المخزنة إلى طاقة حركیة:
أ. الترانزستور ب. المقاومات ج. المجسات د. المحركات
٢٨ . جمیع ما یلي من طرق انتقال الروبوت من مكان لآخر ما عدا:
أ. العجلات ب. السیقان ج. الذراع د. السلسلة
اسئلة على الوحدة الثالثة الروبوت ضع علامة صح أو خطأ " شاملة ومهمة "
الأول: ضع علامة (√) أمام العبارة الصحیحة، و علامة (×) أمام العبارة الخاطئة
١. ( ) الرجل الآلي ینفذ المهام المبرمجة حسب الزمان والمكان المعروفین مسبقا .
٢. ( ) من الأمثلة على الآلات المسیرة ذاتیا غاسل الیدین الآلي لابن سینا .
٣. ( ) كتاب الجامع بین العلم والعمل النافع في صناعة الحیل من مؤلفات العالم العربي بدیع الزمان الجزري .
٤. ( ) من مميزات الروبوت انجاز العمل في ظروف سهلة .
٥. ( ) روبوت الطب یستخدم في تجمیع الأجهزة الإلكترونیة.
٦. ( ) یتكون الروبوت متتبع الخط الأسود من أربع وحدات رئیسة.
٧. ( ) الاشارات الكهربائیة یتم الحصول علیها من المجسات فقط .
٨. ( ) المحركات والسماعات هي مثال على المعالجة والتحكم في الروبوت بینما المجسات الضوئیة مثالا على المخرجات .
٩. ( ) روبوت المتاهة جهاز إلكترومیكانیكي یقوم بوظیفة تتبع خط أسود مرسوم على أرضیة بیضاء من خلال مجسات.
١٠ . ( ) استخدام الترانزستور من طرق بناء الروبوت متتبع الخط الأسود باستخدام القطع الالكترونیة.
١١ . ( ) عندما یكون الخط الأسود بین المجسین الأیمن والأیسر، فإنه لا یصل جهد كافٍ إلى قاعدة الترانزستور.
١٢ . ( ) عندما ینحرف الروبوت جهة الیمین فإن المجس الأیمن یصبح أسفله لون أسود فلا تنعكس الأشعة تحت الحمراء
١٣ . ( ) عندما ینحرف الروبوت جهة الیمین فإن المجس الأیسر یكون في حالة OFF فیتوقف عمل المحرك الأیمن .
١٤ . ( ) عندما یكون كلا المجسین أسفلهما لون أبیض یتوقف الروبوت عن الحركة.
١٥ . ( ) تعتبر المجسات الباعثة للأشعة تحت الحمراء (IR) من مدخلات النظام وتوصل بانحیاز أمامي.
١٦ . ( ) الترانزستور الثاني في دارة الروبوت من الأمثلة على العملیات والتحكم الذي یعمل كمفتاح في الدارة.
١٧ . ( ) یستخدم الثنائي الضوئي للدلالة على أن الدارة تعمل ویوصل في حالة انحیاز أمامي .
١٨ . ( ) یوصل مع المحرك ثنائي عادي لحمایة المحرك من التیار العكسي ویوصل في حالة انحیاز عكسي.
١٩ . ( ) یوصل مع الثنائي المستقبل مقاومة متغیرة ( 22KΩ ) لحمایة الثنائي المستقبل من التلف.
٢٠ . ( ) یوصل باعث الترانزستور مع المحرك بینما یوصل المجمع مع الأرضي GND .
٢١ . ( ) من مميزات الروبوت متتبع الخط الأسود باستخدام الترانزستور لا یخرج عن المسار.
. 22 ( ) المقارنات دارة إلكترونیة تستخدم لتحویل الإشارة الرقمیة إلى إشارة تماثلیة.
٢٣ . ( ) المقارن التماثلي دارة إلكترونیة متكاملة لها مدخلان أحدهما موجب والآخر سالب ولها مخرجان .
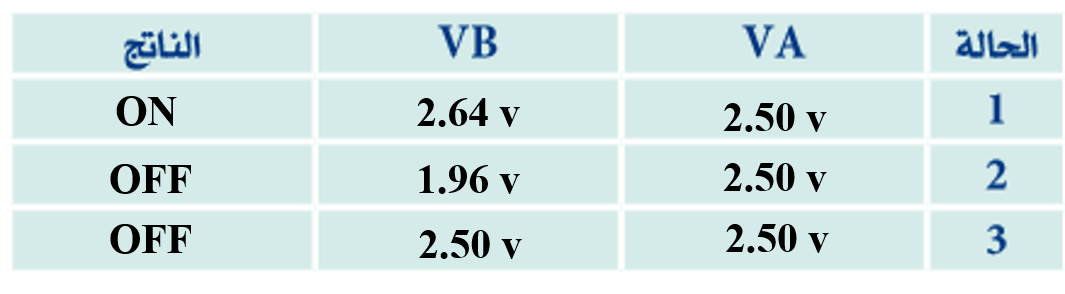
٢٤ . ( ) عندما تكون قیمة إشارة المدخل الموجب VB أعلى من أو تساوي قیمة إشارة المدخل السالب VA یصبح قیمة المخرج 1 = Vout .
٢٥ . ( ) إذا كان السطح المقابل أسود فانه یمتص الأشعة فتقل مقاومة المستقبل مما یجعل VA > VB وبالتالي یكون قیمة المخرج 0=Vout .
٢٦ . ( ) یعتبر المقارن التماثلي الموجود في الدارة المتكاملة مثالا على العملیات فقط باستخدام المقارن .
٢٧ . ( ) یحتاج الروبوت إلى توصیل مباشر بمصدر تغذیة خارجي كالبطاریة أو خلایا كهروضوئیة .
٢٨ . ( ) محركات الروبوت لا تعمل الا باستخدام الكهرباء فقط .
٢٩ . ( ) یستخدم روبوت دافنشي لاستكشاف القنابل وتفجیرها .
٣٠ . ( ) من التطبیقات الواعدة في الحاضر على الروبوتات انتشار الروبوتات البشریة .
١. ( ) الرجل الآلي ینفذ المهام المبرمجة حسب الزمان والمكان المعروفین مسبقا .
٢. ( ) من الأمثلة على الآلات المسیرة ذاتیا غاسل الیدین الآلي لابن سینا .
٣. ( ) كتاب الجامع بین العلم والعمل النافع في صناعة الحیل من مؤلفات العالم العربي بدیع الزمان الجزري .
٤. ( ) من مميزات الروبوت انجاز العمل في ظروف سهلة .
٥. ( ) روبوت الطب یستخدم في تجمیع الأجهزة الإلكترونیة.
٦. ( ) یتكون الروبوت متتبع الخط الأسود من أربع وحدات رئیسة.
٧. ( ) الاشارات الكهربائیة یتم الحصول علیها من المجسات فقط .
٨. ( ) المحركات والسماعات هي مثال على المعالجة والتحكم في الروبوت بینما المجسات الضوئیة مثالا على المخرجات .
٩. ( ) روبوت المتاهة جهاز إلكترومیكانیكي یقوم بوظیفة تتبع خط أسود مرسوم على أرضیة بیضاء من خلال مجسات.
١٠ . ( ) استخدام الترانزستور من طرق بناء الروبوت متتبع الخط الأسود باستخدام القطع الالكترونیة.
١١ . ( ) عندما یكون الخط الأسود بین المجسین الأیمن والأیسر، فإنه لا یصل جهد كافٍ إلى قاعدة الترانزستور.
١٢ . ( ) عندما ینحرف الروبوت جهة الیمین فإن المجس الأیمن یصبح أسفله لون أسود فلا تنعكس الأشعة تحت الحمراء
١٣ . ( ) عندما ینحرف الروبوت جهة الیمین فإن المجس الأیسر یكون في حالة OFF فیتوقف عمل المحرك الأیمن .
١٤ . ( ) عندما یكون كلا المجسین أسفلهما لون أبیض یتوقف الروبوت عن الحركة.
١٥ . ( ) تعتبر المجسات الباعثة للأشعة تحت الحمراء (IR) من مدخلات النظام وتوصل بانحیاز أمامي.
١٦ . ( ) الترانزستور الثاني في دارة الروبوت من الأمثلة على العملیات والتحكم الذي یعمل كمفتاح في الدارة.
١٧ . ( ) یستخدم الثنائي الضوئي للدلالة على أن الدارة تعمل ویوصل في حالة انحیاز أمامي .
١٨ . ( ) یوصل مع المحرك ثنائي عادي لحمایة المحرك من التیار العكسي ویوصل في حالة انحیاز عكسي.
١٩ . ( ) یوصل مع الثنائي المستقبل مقاومة متغیرة ( 22KΩ ) لحمایة الثنائي المستقبل من التلف.
٢٠ . ( ) یوصل باعث الترانزستور مع المحرك بینما یوصل المجمع مع الأرضي GND .
٢١ . ( ) من مميزات الروبوت متتبع الخط الأسود باستخدام الترانزستور لا یخرج عن المسار.
. 22 ( ) المقارنات دارة إلكترونیة تستخدم لتحویل الإشارة الرقمیة إلى إشارة تماثلیة.
٢٣ . ( ) المقارن التماثلي دارة إلكترونیة متكاملة لها مدخلان أحدهما موجب والآخر سالب ولها مخرجان .
٢٤ . ( ) عندما تكون قیمة إشارة المدخل الموجب VB أعلى من أو تساوي قیمة إشارة المدخل السالب VA یصبح قیمة المخرج 1 = Vout .
٢٥ . ( ) إذا كان السطح المقابل أسود فانه یمتص الأشعة فتقل مقاومة المستقبل مما یجعل VA > VB وبالتالي یكون قیمة المخرج 0=Vout .
٢٦ . ( ) یعتبر المقارن التماثلي الموجود في الدارة المتكاملة مثالا على العملیات فقط باستخدام المقارن .
٢٧ . ( ) یحتاج الروبوت إلى توصیل مباشر بمصدر تغذیة خارجي كالبطاریة أو خلایا كهروضوئیة .
٢٨ . ( ) محركات الروبوت لا تعمل الا باستخدام الكهرباء فقط .
٢٩ . ( ) یستخدم روبوت دافنشي لاستكشاف القنابل وتفجیرها .
٣٠ . ( ) من التطبیقات الواعدة في الحاضر على الروبوتات انتشار الروبوتات البشریة .
اسئلة على درس آفاق مستفبلية والروبوت
س 1 : اذكر أنواع الطاقة المستخدمة في الروبوت ؟
أنواع الطاقة :
۱) بطاریات قابلة للشحن (یشحن الروبوت نفسه ذاتیا حیث یتجه لأقرب مقبس كھربائي.
۲) بعض الروبوتات مزودة بخلایا كھروضوئیة (تتغذى بالطاقة الكھربائیة المستمدة من الشمس.
س 2 : كیف ینتقل الروبوت من مكان الى آخر؟
۱- باستخدام العجلات.
-2بعضھا لھا سیقان وأرجل تمشي بھا.
3- من خلال سلسلة "جنزیر"
4 - البعض منھا ثابت في مكانھ .
س 3 : "الروبوت یحاكي الانسان" : ناقش ھذه العبارة مع تحدید أھم التحدیات التي یعكف علماء الروبوت على تجاوزھا لتحقیق ذلك.
تجري المحاولات لمحاكاة بنیة الدماغ البشري حیث یتمكن الروبوت من التصرف وفق المستجدات في المحیط المتواجد ه ب.
محاكاة بنیة الدماغ البشري تقوم على تزوید الروبوت بتقنیة تمكنه م ن التعلم م ن أمثة ل سابقة والتأقلم مع الظ روف والمستجدات
المحیطة به
س 4 : اذكر بعض الجھود العربیة في مجال الروبوت.
۱) الروبوت ابن سینا أول روبوت عربي تفاعلي یتحدث باللغة العربیة.
۲) تصمیم روبوت لاخماد الحرائق في المغرب.
۳) تصمیم روبوت لتفكیك القنابل في العراق.
٤) تصمیم روبوت لكشف المعادن في السودان.
٥) استخدام الروبوت دافنشي في مستشفیات السعودیة.
٦) ادخال مادة تصمیم الروبوت في معظم مناھج الدول العربیة.
س 5 : اذكر بعض الافاق المستقبلیة لعلم الروبوت .
Humanoid یتوقع العلماء ان تنتشر في المستقبل القریب الروبوتات الذكیة التي یطلق علیھا "روبوتات بشریة" ھیومانوید
Robots وھي روبوتات لھا شكل الانسان قادرة على محاكاة حركات الانسان وانفعالاتھ وقادرة على التعلم من المحیط لمحاكاة
تفكییر الانسان .
س 6 : ما میزات الروبوت المتتبع للخط باستخدام المقارن.Comparator
التعامل مع اشارة رقمیة بدلا من الاشارة التماثلیة حیث یقوم المقارن بتحویل الاشارة التماثلیة القادمة من المجسات (مستقبل
الاشعة تحت الحمراء) الى اشارة رقمیة وتمریرھا للترانزستور المرتبط مع المحرك وبالتالي تكون سرعة الروبوت اثناء الحركة
ثابتھ .
س 7 : ما میزات الروبوت المتتبع للخط باستخدام الاوردینو .Arduino
امكانیة استخدم اكثر من مجسین للتحكم بحركة محركي الروبوت حیث تم استخدام ثلاث مجسات في روبوت الكتاب وبالتالي زیادة
دقة الروبوت اثناء الحركة.
س 8 : اقترح حلا مناسبا لتخفیف سرعة الروبوت البسیط .
توصیل المحركین على جھد 3 فولت بدلا من 6 فولت .
س 9 : علل ما یلي :
أ - خروج الروبوت البسیط ذو المجسین عن المسار.
یخرج الروبوت عن المسار بسبب سرعتھ لذلك یجب وصل المحركین على 3 فولت بدلا من 6 فولت ، كما انھ یخرج
عن المسار في حال كونھ معقد لذلك من الافضل استخدام 3 مجسات.
ب - اھتزاز الروبوت البسیط بشكل مستمر أثناء السیر.
بسبب تأخر استجابة الترانزستورین.
بناء روبوت متتبع الخط باستخدام المقارن
 بناء
روبوت متتبع الخط باستخدام المقارن
بناء
روبوت متتبع الخط باستخدام المقارن
المقارنات Comparators:
عبارة عن دارات كهربائية متكاملة لتحويل الاشارات التماثلية إلى رقمية
 المقارن التماثلي LM324:
المقارن التماثلي LM324:
عبارة عن دارة كهربائية متكاملة لها مدخلان أحدهما موجب والآخر سالب ولها مخرج واحد
مثال توضيحي بناءاً على النشاط الوراد في الكتاب المدرسي ص78

نستنتج
أن:
المقارن
التماثلي يأخذ إشارة تماثلية من المدخل الموجب والسالب ويقوم بعمل مقارنة بين
الجهدين حيث أنه إذا كان:

V1 > V2 ===> Vout = 1
V1 < V2 ===> Vout = 0
V1 = V2 ===> Vout = 0
مكونات دائرة الروبوت باستخدام المقارن:
أولاً:
المدخلات:
وهي
عبارة عن المجسات وتعمل بالأشعة تحت الحمراء (IR) (المرسل
والمستقبل)


ثانياً:
العمليات والتحكم:
عبارة
عن المقارن التماثلي الموجود في دارة متكاملة LM324.

ترانزستور
يعمل كمفتاح في الدارة.
 ثالثاً:
المخرجات:
ثالثاً:
المخرجات:
وهي
عبارة عن محرك + ثنائي باعث للضوء.
مخطط دائرة الروبوت باستخدام المقارن

آلية عمل الروبوت باستخدام المقارن

عيوب استخدام الروبوت باستخدام المجسين
1. اهتزاز
الروبوت بشكل ملحوظ أثناء السير.
2. خروج
الروبوت عن المسار أثناء سيره بسرعة عالية.
3.
خروج الروبوت عن المسار في حال كان المسار أكثر تعقيداً.
الحل:
استخدام أكثر من مجسين وهذا يتطلب إضافة متحكم (الأردوينو)
بناء الروبوت باستخدام الترانزستور
بناء الروبوت باستخدام الترانزستور
مكونات دارة الروبوت باستخدام الترانزستور

أولاً:
المدخلات:
وهي عبارة عن المجسات وتعمل بالأشعة تحت الحمراء (IR)
 تنقسم إلى قسمين:
تنقسم إلى قسمين:
1. المرسل: يرسل الأشعة تحت الحمراء و تنعكس عن الخط الأبيض (يوصل بانحياز أمامي).
2. المستقبل: يستقبل الأشعة الصادرة عن المرسل (يوصل بانحياز عكسي). لونه أسود ويسمى (photo diode)
ثانياً: العمليات
والتحكم:
 وهي عبارة عن ترانزستورين موصلين على التوالي.
وهي عبارة عن ترانزستورين موصلين على التوالي.
1. الترانزستور
الأول: يعمل كمفتاح في الدارة.
2. الترانزستور
الثاني: يعمل على تضخيم التيار الواصل للمخرجات.

ثالثاً: المخرجات:
وهي
عبارة عن محرك + ثنائي باعث للضوء.
1.
المحرك: لتحريك الروبوت في الاتجاه المناسب.
2.
ثنائي باعث للضوء: يشير إلى أن الدارة تعمل.
ملاحظة:
 يوصل
مع المحرك ثنائي عادي: لحماية
الترانزستور من التيار العكسي يوصل مع المحرك توصيل عكسي.
يوصل
مع المحرك ثنائي عادي: لحماية
الترانزستور من التيار العكسي يوصل مع المحرك توصيل عكسي.
آلية عمل الروبوت باستخدام الترانزستور

عيوب الروبوت متتبع الخط الأسود باستخدام الترانزستور والحلول:
1. الروبوت سريع ويخرج عن المسار لأنه يصل للمحرك 6V.
الحل: استخدام بطارية منفصلة قيمتها 3V ووضع تروس
مع المحرك.
2. لا
يعمل بشكل جيد و ذلك لأن المحركات ذات أحمال صغيرة (مقاومتها صغيرة)لذا يسحب
المحرك
كل التيار و يؤثر على دائرة
المجسات.
الحل: فصل دارة المجسات عن دارة السائق driver.
3. لا يتحمل الترانزستور
تياراً عالياً يمكن يؤدي إلى تلفه.
الحل: استخدام ترانزستور يتحمل التيار
العالي مثل D880.
الاشتراك في:
الرسائل (Atom)