 بناء
روبوت متتبع الخط باستخدام المقارن
بناء
روبوت متتبع الخط باستخدام المقارن
المقارنات Comparators:
عبارة عن دارات كهربائية متكاملة لتحويل الاشارات التماثلية إلى رقمية
 المقارن التماثلي LM324:
المقارن التماثلي LM324:
عبارة عن دارة كهربائية متكاملة لها مدخلان أحدهما موجب والآخر سالب ولها مخرج واحد
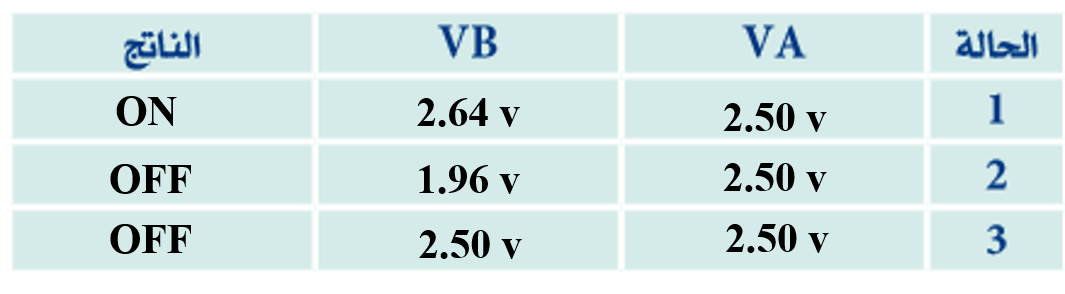
مثال توضيحي بناءاً على النشاط الوراد في الكتاب المدرسي ص78

نستنتج
أن:
المقارن
التماثلي يأخذ إشارة تماثلية من المدخل الموجب والسالب ويقوم بعمل مقارنة بين
الجهدين حيث أنه إذا كان:

V1 > V2 ===> Vout = 1
V1 < V2 ===> Vout = 0
V1 = V2 ===> Vout = 0
مكونات دائرة الروبوت باستخدام المقارن:
أولاً:
المدخلات:
وهي
عبارة عن المجسات وتعمل بالأشعة تحت الحمراء (IR) (المرسل
والمستقبل)


ثانياً:
العمليات والتحكم:
عبارة
عن المقارن التماثلي الموجود في دارة متكاملة LM324.

ترانزستور
يعمل كمفتاح في الدارة.
 ثالثاً:
المخرجات:
ثالثاً:
المخرجات:
وهي
عبارة عن محرك + ثنائي باعث للضوء.
مخطط دائرة الروبوت باستخدام المقارن

آلية عمل الروبوت باستخدام المقارن

عيوب استخدام الروبوت باستخدام المجسين
1. اهتزاز
الروبوت بشكل ملحوظ أثناء السير.
2. خروج
الروبوت عن المسار أثناء سيره بسرعة عالية.
3.
خروج الروبوت عن المسار في حال كان المسار أكثر تعقيداً.
الحل:
استخدام أكثر من مجسين وهذا يتطلب إضافة متحكم (الأردوينو)
جزاكم الله خيرا ...
ردحذفما وظيفة الترانزستور هنا
ردحذفهل مضخم ام مفتاح
حذفشكرااااااااااا كتير استفدنااااا
ردحذفلماذا استخدمنا المقارن في الدارة
ردحذف